Robust transformer models
test code for recent robust transformer models



import mmcv
import matplotlib.pyplot as plt
from fastcore.basics import *
from fastai.vision.all import *
from fastai.torch_basics import *
import warnings
warnings.filterwarnings("ignore")
import kornia
from kornia.constants import Resample
from kornia.color import *
from kornia import augmentation as K
import kornia.augmentation as F
import kornia.augmentation.random_generator as rg
from torchvision.transforms import functional as tvF
from torchvision.transforms import transforms
from torchvision.transforms import PILToTensor
from functools import partial
from timm.models.layers import trunc_normal_, DropPath
from timm.data import IMAGENET_DEFAULT_MEAN, IMAGENET_DEFAULT_STD
from timm.models.vision_transformer import _cfg
from einops import rearrange
from timm.models.registry import register_model
set_seed(105)
set_seed(105)
train_a_path = Path("/home/ubuntu/sharedData/swp/dlLab/fastaiRepository/fastai/data/rsData/kaggleOriginal/Potsdam/2_Ortho_RGB/")
label_a_path = Path("/home/ubuntu/sharedData/swp/dlLab/fastaiRepository/fastai/data/rsData/kaggleOriginal/Potsdam/5_labels_for_participants/")
dsm_path = Path("/home/ubuntu/sharedData/swp/dlLab/fastaiRepository/fastai/data/rsData/kaggleOriginal/Potsdam/1_dsm/1_DSM/")
ndsm_path = Path("/home/ubuntu/sharedData/swp/dlLab/fastaiRepository/fastai/data/rsData/kaggleOriginal/Potsdam/1_dsm_normalisation/1_DSM_normalisation/")
imgNames = get_image_files(train_a_path)
lblNames = get_image_files(label_a_path)
dsmNames = get_image_files(dsm_path)
to_tensor = transforms.ToTensor()
to_pil = transforms.ToPILImage()
rgbImage = Image.open(imgNames[0])
lblImage = Image.open(lblNames[0])
dsmImage = Image.open(dsmNames[0])
rgbTensor = image2tensor(rgbImage)
lblTensor = image2tensor(lblImage)
dsmTensor = image2tensor(dsmImage)
type(lblTensor)
rgbTensor.shape
lblTensor.shape
dsmTensor.shape
torch.unique(lblTensor)
lblTensor.shape
(dsmImage).shape
image2tensor(dsmImage)
tempImg = dsmImage.convert("RGB")
tempImg.shape
temptensor =image2tensor(tempImg)
temptensor
temptensor.shape
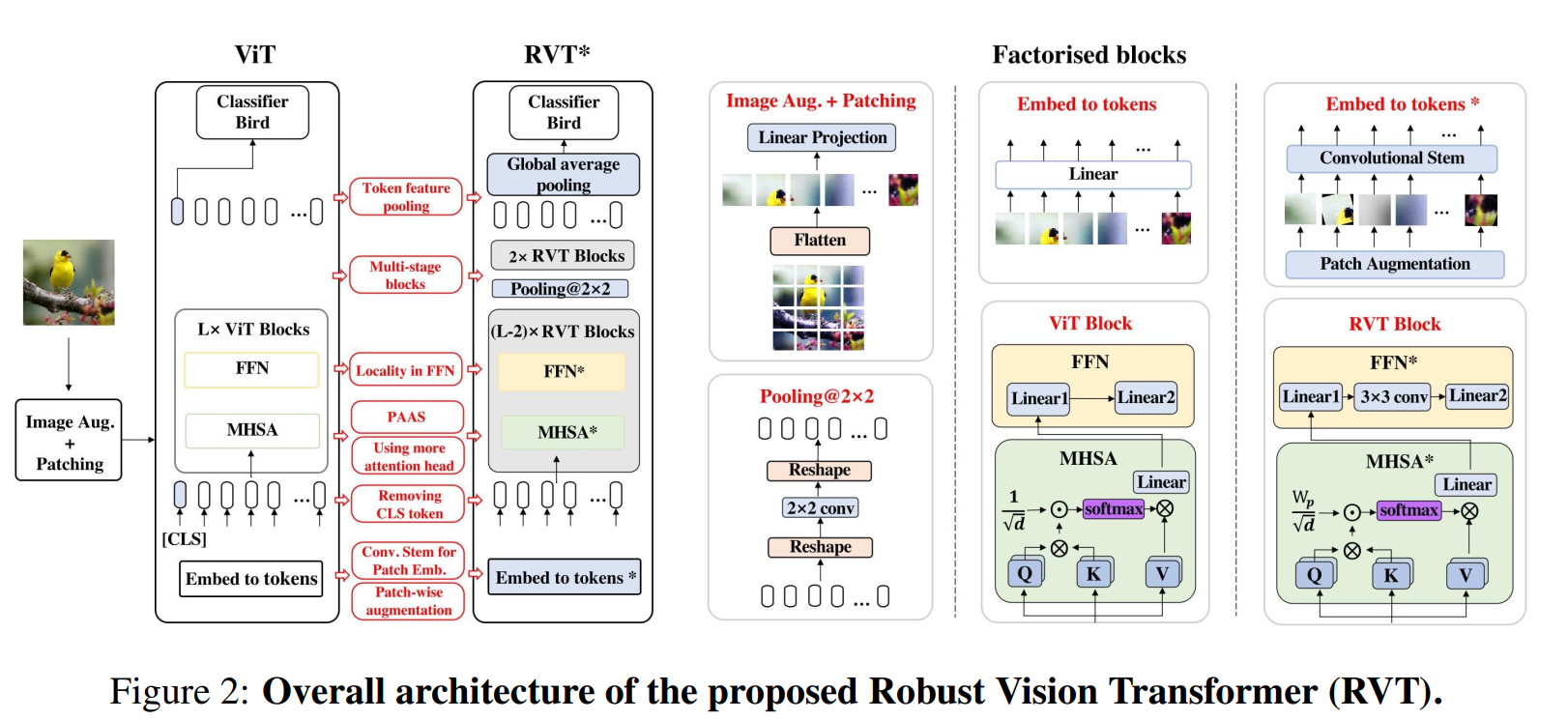
1) Extract low-level feature of patches using a convolutional stem; 2) Adopt the multi-stage design of ViTs and avoid blocks with larger spatial resolution; 3) Choose a suitable number of heads; 4) Use convolution in FFN; 5) Replace CLS token with token feature pooling.
class Mlp(nn.Module):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.in_features = in_features
if in_features == 768:
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
else:
self.fc1 = nn.Conv2d(in_features, hidden_features, 1)
self.bn1 = nn.BatchNorm2d(hidden_features)
self.dwconv = nn.Conv2d(hidden_features, hidden_features, 3, padding=1, groups=hidden_features)
self.bn2 = nn.BatchNorm2d(hidden_features)
self.act = act_layer()
self.fc2 = nn.Conv2d(hidden_features, out_features, 1)
self.bn3 = nn.BatchNorm2d(out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
if self.in_features == 768:
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
else:
B,N,C = x.shape
x = x.reshape(B, int(N**0.5), int(N**0.5), C).permute(0,3,1,2)
x = self.bn1(self.fc1(x))
x = self.act(x)
x = self.drop(x)
x = self.act(self.bn2(self.dwconv(x)))
x = self.bn3(self.fc2(x))
x = self.drop(x)
x = x.permute(0,2,3,1).reshape(B, -1, C)
return x
class Attention(nn.Module):
def __init__(self, dim, num_heads=8, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0., use_mask=False):
super().__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
# NOTE scale factor was wrong in my original version, can set manually to be compat with prev weights
self.scale = qk_scale or head_dim ** -0.5
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
self.use_mask = use_mask
if use_mask:
self.att_mask = nn.Parameter(torch.Tensor(self.num_heads, 196, 196))
def forward(self, x):
B, N, C = x.shape
qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
attn = (q @ k.transpose(-2, -1)) * self.scale
if self.use_mask:
attn = attn * torch.sigmoid(self.att_mask).expand(B, -1, -1, -1)
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
class Block(nn.Module):
def __init__(self, dim, num_heads, mlp_ratio=4., qkv_bias=False, qk_scale=None, drop=0., attn_drop=0.,
drop_path=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm, use_mask=False):
super().__init__()
self.norm1 = norm_layer(dim)
self.attn = Attention(
dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop, use_mask=use_mask)
# NOTE: drop path for stochastic depth, we shall see if this is better than dropout here
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
def forward(self, x):
x = x + self.drop_path(self.attn(self.norm1(x)))
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
class Transformer(nn.Module):
def __init__(self, base_dim, depth, heads, mlp_ratio,
drop_rate=.0, attn_drop_rate=.0, drop_path_prob=None, use_mask=False, masked_block=None):
super(Transformer, self).__init__()
self.layers = nn.ModuleList([])
self.depth = depth
embed_dim = base_dim * heads
if drop_path_prob is None:
drop_path_prob = [0.0 for _ in range(depth)]
if use_mask==True:
assert masked_block is not None
self.blocks = nn.ModuleList()
for i in range(depth):
if i < masked_block:
self.blocks.append(Block(
dim=embed_dim,
num_heads=heads,
mlp_ratio=mlp_ratio,
qkv_bias=True,
drop=drop_rate,
attn_drop=attn_drop_rate,
drop_path=drop_path_prob[i],
norm_layer=partial(nn.LayerNorm, eps=1e-6),
use_mask=use_mask
))
else:
self.blocks.append(Block(
dim=embed_dim,
num_heads=heads,
mlp_ratio=mlp_ratio,
qkv_bias=True,
drop=drop_rate,
attn_drop=attn_drop_rate,
drop_path=drop_path_prob[i],
norm_layer=partial(nn.LayerNorm, eps=1e-6),
use_mask=False
))
else:
self.blocks = nn.ModuleList([
Block(
dim=embed_dim,
num_heads=heads,
mlp_ratio=mlp_ratio,
qkv_bias=True,
drop=drop_rate,
attn_drop=attn_drop_rate,
drop_path=drop_path_prob[i],
norm_layer=partial(nn.LayerNorm, eps=1e-6),
use_mask=use_mask
)
for i in range(depth)])
def forward(self, x):
B,C,H,W = x.shape
x = rearrange(x, 'b c h w -> b (h w) c')
# x = x.permute(0,2,3,1).reshape(B, H * W, C)
for i in range(self.depth):
x = self.blocks[i](x)
# x = x.reshape(B, H, W, C).permute(0,3,1,2)
x = rearrange(x, 'b (h w) c -> b c h w', h=H, w=W)
return x
class conv_head_pooling(nn.Module):
def __init__(self, in_feature, out_feature, stride,
padding_mode='zeros'):
super(conv_head_pooling, self).__init__()
self.conv = nn.Conv2d(in_feature, out_feature, kernel_size=stride + 1,
padding=stride // 2, stride=stride,
padding_mode=padding_mode, groups=in_feature)
def forward(self, x):
x = self.conv(x)
return x
class conv_embedding(nn.Module):
def __init__(self, in_channels, out_channels, patch_size,
stride, padding):
super(conv_embedding, self).__init__()
self.out_channels = out_channels
self.proj = nn.Sequential(
nn.Conv2d(in_channels, 32, kernel_size=(7, 7), stride=(2, 2), padding=(2, 2)),
nn.BatchNorm2d(32),
nn.MaxPool2d(3, stride=2, padding=1),
nn.Conv2d(32, out_channels, kernel_size=(4, 4), stride=(4, 4))
)
def forward(self, x):
B = x.shape[0]
x = self.proj(x)
return x
class PoolingTransformer(nn.Module):
def __init__(self, image_size, patch_size, stride, base_dims, depth, heads,
mlp_ratio, num_classes=1000, in_chans=3,
attn_drop_rate=.0, drop_rate=.0, drop_path_rate=.0, use_mask=False, masked_block=None):
super(PoolingTransformer, self).__init__()
total_block = sum(depth)
padding = 0
block_idx = 0
width = math.floor(
(image_size / stride))
self.base_dims = base_dims
self.heads = heads
self.num_classes = num_classes
self.patch_size = patch_size
self.patch_embed = conv_embedding(in_chans, base_dims[0] * heads[0],
patch_size, stride, padding)
self.pos_drop = nn.Dropout(p=drop_rate)
self.transformers = nn.ModuleList([])
self.pools = nn.ModuleList([])
for stage in range(len(depth)):
drop_path_prob = [drop_path_rate * i / total_block
for i in range(block_idx, block_idx + depth[stage])]
block_idx += depth[stage]
if stage == 0:
self.transformers.append(
Transformer(base_dims[stage], depth[stage], heads[stage],
mlp_ratio,
drop_rate, attn_drop_rate, drop_path_prob, use_mask=use_mask, masked_block=masked_block)
)
else:
self.transformers.append(
Transformer(base_dims[stage], depth[stage], heads[stage],
mlp_ratio,
drop_rate, attn_drop_rate, drop_path_prob)
)
if stage < len(heads) - 1:
self.pools.append(
conv_head_pooling(base_dims[stage] * heads[stage],
base_dims[stage + 1] * heads[stage + 1],
stride=2
)
)
self.norm = nn.LayerNorm(base_dims[-1] * heads[-1], eps=1e-6)
self.embed_dim = base_dims[-1] * heads[-1]
self.gap = nn.AdaptiveAvgPool2d(1)
# Classifier head
if num_classes > 0:
self.head = nn.Linear(base_dims[-1] * heads[-1], num_classes)
else:
self.head = nn.Identity()
self.apply(self._init_weights)
def _init_weights(self, m):
if isinstance(m, nn.LayerNorm):
nn.init.constant_(m.bias, 0)
nn.init.constant_(m.weight, 1.0)
@torch.jit.ignore
def no_weight_decay(self):
return {'pos_embed'}
def get_classifier(self):
return self.head
def reset_classifier(self, num_classes, global_pool=''):
self.num_classes = num_classes
if num_classes > 0:
self.head = nn.Linear(self.embed_dim, num_classes)
else:
self.head = nn.Identity()
def forward_features(self, x):
x = self.patch_embed(x)
x = self.pos_drop(x)
for stage in range(len(self.pools)):
x = self.transformers[stage](x)
x = self.pools[stage](x)
x = self.transformers[-1](x)
cls_features = self.norm(self.gap(x).squeeze())
return cls_features
def forward(self, x):
cls_features = self.forward_features(x)
output = self.head(cls_features)
return output
model = PoolingTransformer(
image_size=224,
patch_size=16,
stride=16,
base_dims=[32, 32],
depth=[10, 2],
heads=[6, 12],
mlp_ratio=4
)
input = torch.randn(1, 3, 224, 224)
output = model(input)
output.shape
temp = torch.arange(1,28).view(1,3,3,3).float()
temp
temp.shape
temp2 = torch.nn.Unfold(kernel_size=2, stride=1)(temp)
temp2.shape
temp2
import torch
import torch.nn as nn
import numpy as np
from timm.models.layers import DropPath
from timm.models.helpers import load_pretrained
from timm.models.registry import register_model
from timm.models.layers import trunc_normal_
class Mlp(nn.Module):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class Attention(nn.Module):
def __init__(self, dim, num_heads=8, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0.):
super().__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
def forward(self, x):
B, N, C = x.shape
qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
q, k, v = qkv[0], qkv[1], qkv[2]
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
class Block(nn.Module):
def __init__(self, dim, num_heads, mlp_ratio=4., qkv_bias=False, qk_scale=None, drop=0., attn_drop=0.,
drop_path=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm):
super().__init__()
self.norm1 = norm_layer(dim)
self.attn = Attention(
dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
def forward(self, x):
x = x + self.drop_path(self.attn(self.norm1(x)))
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
def get_sinusoid_encoding(n_position, d_hid):
''' Sinusoid position encoding table '''
def get_position_angle_vec(position):
return [position / np.power(10000, 2 * (hid_j // 2) / d_hid) for hid_j in range(d_hid)]
sinusoid_table = np.array([get_position_angle_vec(pos_i) for pos_i in range(n_position)])
sinusoid_table[:, 0::2] = np.sin(sinusoid_table[:, 0::2]) # dim 2i
sinusoid_table[:, 1::2] = np.cos(sinusoid_table[:, 1::2]) # dim 2i+1
return torch.FloatTensor(sinusoid_table).unsqueeze(0)
class Token_performer(nn.Module):
def __init__(self, dim, in_dim, head_cnt=1, kernel_ratio=0.5, dp1=0.1, dp2 = 0.1):
super().__init__()
self.emb = in_dim * head_cnt # we use 1, so it is no need here
self.kqv = nn.Linear(dim, 3 * self.emb)
self.dp = nn.Dropout(dp1)
self.proj = nn.Linear(self.emb, self.emb)
self.head_cnt = head_cnt
self.norm1 = nn.LayerNorm(dim)
self.norm2 = nn.LayerNorm(self.emb)
self.epsilon = 1e-8 # for stable in division
self.mlp = nn.Sequential(
nn.Linear(self.emb, 1 * self.emb),
nn.GELU(),
nn.Linear(1 * self.emb, self.emb),
nn.Dropout(dp2),
)
self.m = int(self.emb * kernel_ratio)
self.w = torch.randn(self.m, self.emb)
self.w = nn.Parameter(nn.init.orthogonal_(self.w) * math.sqrt(self.m), requires_grad=False)
def prm_exp(self, x):
# part of the function is borrow from https://github.com/lucidrains/performer-pytorch
# and Simo Ryu (https://github.com/cloneofsimo)
# ==== positive random features for gaussian kernels ====
# x = (B, T, hs)
# w = (m, hs)
# return : x : B, T, m
# SM(x, y) = E_w[exp(w^T x - |x|/2) exp(w^T y - |y|/2)]
# therefore return exp(w^Tx - |x|/2)/sqrt(m)
xd = ((x * x).sum(dim=-1, keepdim=True)).repeat(1, 1, self.m) / 2
wtx = torch.einsum('bti,mi->btm', x.float(), self.w)
return torch.exp(wtx - xd) / math.sqrt(self.m)
def single_attn(self, x):
k, q, v = torch.split(self.kqv(x), self.emb, dim=-1)
kp, qp = self.prm_exp(k), self.prm_exp(q) # (B, T, m), (B, T, m)
D = torch.einsum('bti,bi->bt', qp, kp.sum(dim=1)).unsqueeze(dim=2) # (B, T, m) * (B, m) -> (B, T, 1)
kptv = torch.einsum('bin,bim->bnm', v.float(), kp) # (B, emb, m)
y = torch.einsum('bti,bni->btn', qp, kptv) / (D.repeat(1, 1, self.emb) + self.epsilon) # (B, T, emb)/Diag
# skip connection
y = v + self.dp(self.proj(y)) # same as token_transformer in T2T layer, use v as skip connection
return y
def forward(self, x):
x = self.single_attn(self.norm1(x))
x = x + self.mlp(self.norm2(x))
return x
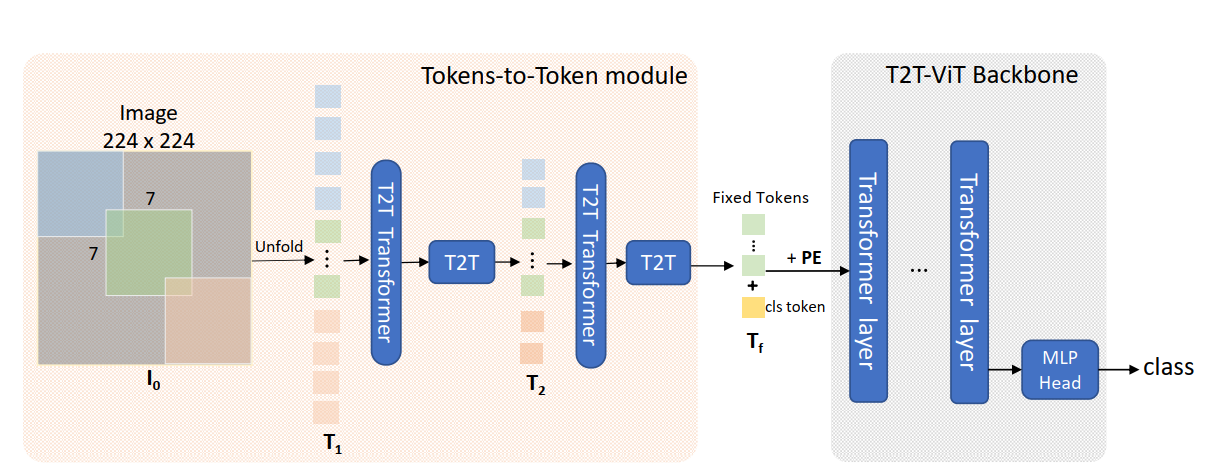
class T2T_module(nn.Module):
"""
Tokens-to-Token encoding module
"""
def __init__(self, img_size=224, tokens_type='performer', in_chans=3, embed_dim=768, token_dim=64):
super().__init__()
if tokens_type == 'transformer':
print('adopt transformer encoder for tokens-to-token')
self.soft_split0 = nn.Unfold(kernel_size=(7, 7), stride=(4, 4), padding=(2, 2))
self.soft_split1 = nn.Unfold(kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
self.soft_split2 = nn.Unfold(kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
self.attention1 = Token_transformer(dim=in_chans * 7 * 7, in_dim=token_dim, num_heads=1, mlp_ratio=1.0)
self.attention2 = Token_transformer(dim=token_dim * 3 * 3, in_dim=token_dim, num_heads=1, mlp_ratio=1.0)
self.project = nn.Linear(token_dim * 3 * 3, embed_dim)
elif tokens_type == 'performer':
print('adopt performer encoder for tokens-to-token')
self.soft_split0 = nn.Unfold(kernel_size=(7, 7), stride=(4, 4), padding=(2, 2))
self.soft_split1 = nn.Unfold(kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
self.soft_split2 = nn.Unfold(kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
#self.attention1 = Token_performer(dim=token_dim, in_dim=in_chans*7*7, kernel_ratio=0.5)
#self.attention2 = Token_performer(dim=token_dim, in_dim=token_dim*3*3, kernel_ratio=0.5)
self.attention1 = Token_performer(dim=in_chans*7*7, in_dim=token_dim, kernel_ratio=0.5)
self.attention2 = Token_performer(dim=token_dim*3*3, in_dim=token_dim, kernel_ratio=0.5)
self.project = nn.Linear(token_dim * 3 * 3, embed_dim)
elif tokens_type == 'convolution': # just for comparison with conolution, not our model
# for this tokens type, you need change forward as three convolution operation
print('adopt convolution layers for tokens-to-token')
self.soft_split0 = nn.Conv2d(3, token_dim, kernel_size=(7, 7), stride=(4, 4), padding=(2, 2)) # the 1st convolution
self.soft_split1 = nn.Conv2d(token_dim, token_dim, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1)) # the 2nd convolution
self.project = nn.Conv2d(token_dim, embed_dim, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1)) # the 3rd convolution
self.num_patches = (img_size // (4 * 2 * 2)) * (img_size // (4 * 2 * 2)) # there are 3 sfot split, stride are 4,2,2 seperately
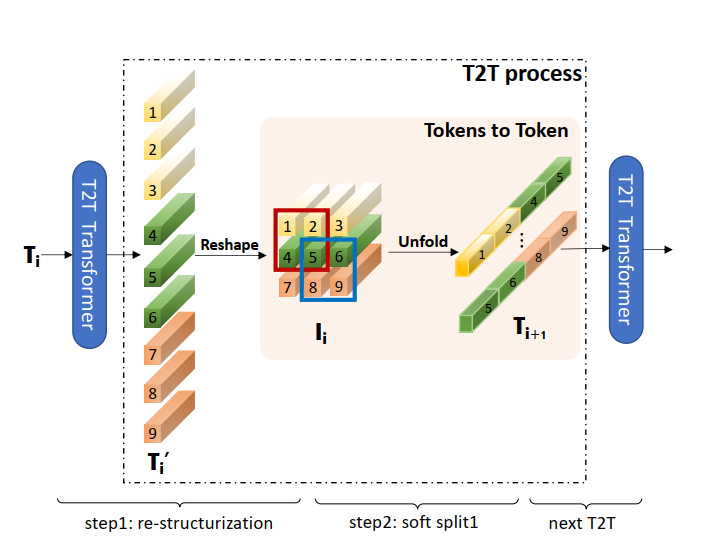
def forward(self, x):
# step0: soft split
x = self.soft_split0(x).transpose(1, 2)
# iteration1: re-structurization/reconstruction
x = self.attention1(x)
B, new_HW, C = x.shape
x = x.transpose(1,2).reshape(B, C, int(np.sqrt(new_HW)), int(np.sqrt(new_HW)))
# iteration1: soft split
x = self.soft_split1(x).transpose(1, 2)
# iteration2: re-structurization/reconstruction
x = self.attention2(x)
B, new_HW, C = x.shape
x = x.transpose(1, 2).reshape(B, C, int(np.sqrt(new_HW)), int(np.sqrt(new_HW)))
# iteration2: soft split
x = self.soft_split2(x).transpose(1, 2)
# final tokens
x = self.project(x)
return x
class T2T_ViT(nn.Module):
def __init__(self, img_size=224, tokens_type='performer', in_chans=3, num_classes=1000, embed_dim=768, depth=12,
num_heads=12, mlp_ratio=4., qkv_bias=False, qk_scale=None, drop_rate=0., attn_drop_rate=0.,
drop_path_rate=0., norm_layer=nn.LayerNorm, token_dim=64):
super().__init__()
self.num_classes = num_classes
self.num_features = self.embed_dim = embed_dim # num_features for consistency with other models
self.tokens_to_token = T2T_module(
img_size=img_size, tokens_type=tokens_type, in_chans=in_chans, embed_dim=embed_dim, token_dim=token_dim)
num_patches = self.tokens_to_token.num_patches
self.cls_token = nn.Parameter(torch.zeros(1, 1, embed_dim))
self.pos_embed = nn.Parameter(data=get_sinusoid_encoding(n_position=num_patches + 1, d_hid=embed_dim), requires_grad=False)
self.pos_drop = nn.Dropout(p=drop_rate)
dpr = [x.item() for x in torch.linspace(0, drop_path_rate, depth)] # stochastic depth decay rule
self.blocks = nn.ModuleList([
Block(
dim=embed_dim, num_heads=num_heads, mlp_ratio=mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale,
drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr[i], norm_layer=norm_layer)
for i in range(depth)])
self.norm = norm_layer(embed_dim)
# Classifier head
self.head = nn.Linear(embed_dim, num_classes) if num_classes > 0 else nn.Identity()
trunc_normal_(self.cls_token, std=.02)
self.apply(self._init_weights)
def _init_weights(self, m):
if isinstance(m, nn.Linear):
trunc_normal_(m.weight, std=.02)
if isinstance(m, nn.Linear) and m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.LayerNorm):
nn.init.constant_(m.bias, 0)
nn.init.constant_(m.weight, 1.0)
@torch.jit.ignore
def no_weight_decay(self):
return {'cls_token'}
def get_classifier(self):
return self.head
def reset_classifier(self, num_classes, global_pool=''):
self.num_classes = num_classes
self.head = nn.Linear(self.embed_dim, num_classes) if num_classes > 0 else nn.Identity()
def forward_features(self, x):
B = x.shape[0]
x = self.tokens_to_token(x)
cls_tokens = self.cls_token.expand(B, -1, -1)
x = torch.cat((cls_tokens, x), dim=1)
x = x + self.pos_embed
x = self.pos_drop(x)
for blk in self.blocks:
x = blk(x)
x = self.norm(x)
return x[:, 0]
def forward(self, x):
x = self.forward_features(x)
x = self.head(x)
return x
t2tModel = T2T_ViT()
x = torch.randn(1, 3, 224, 224)
y = t2tModel(x)
y.shape